

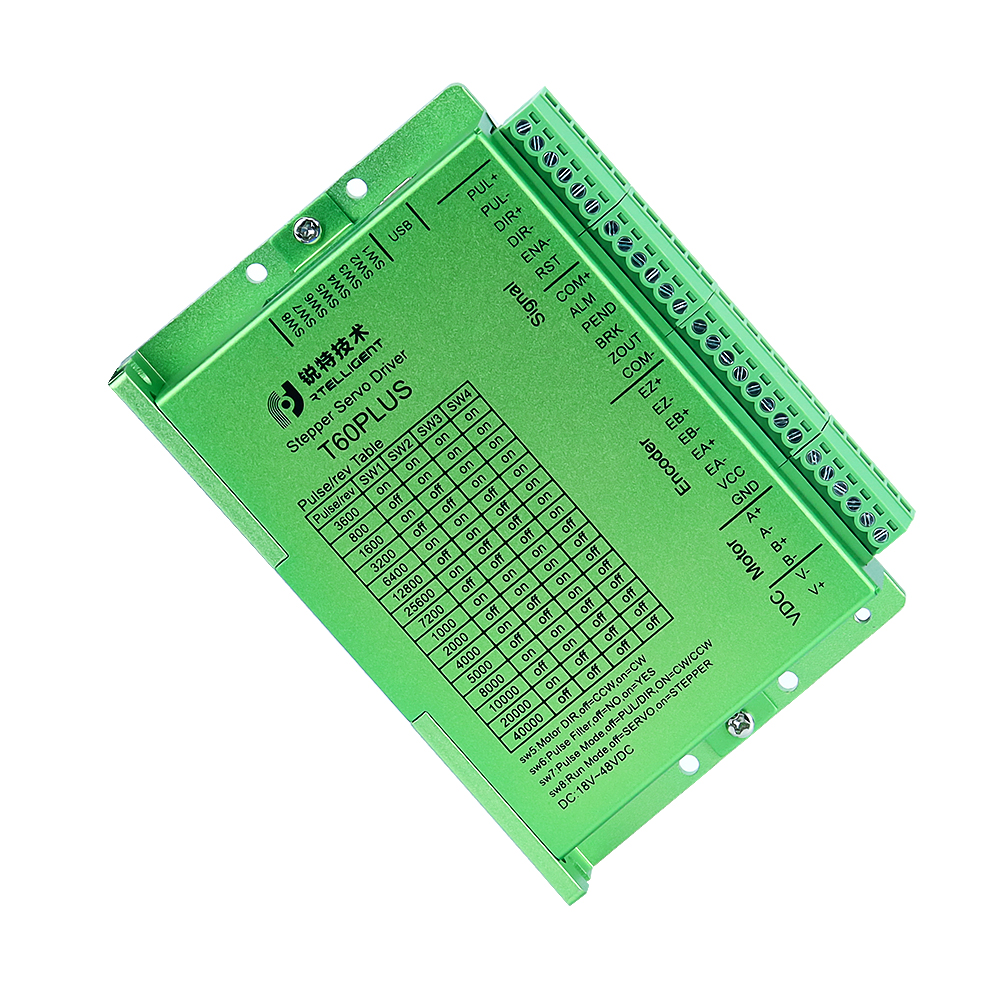
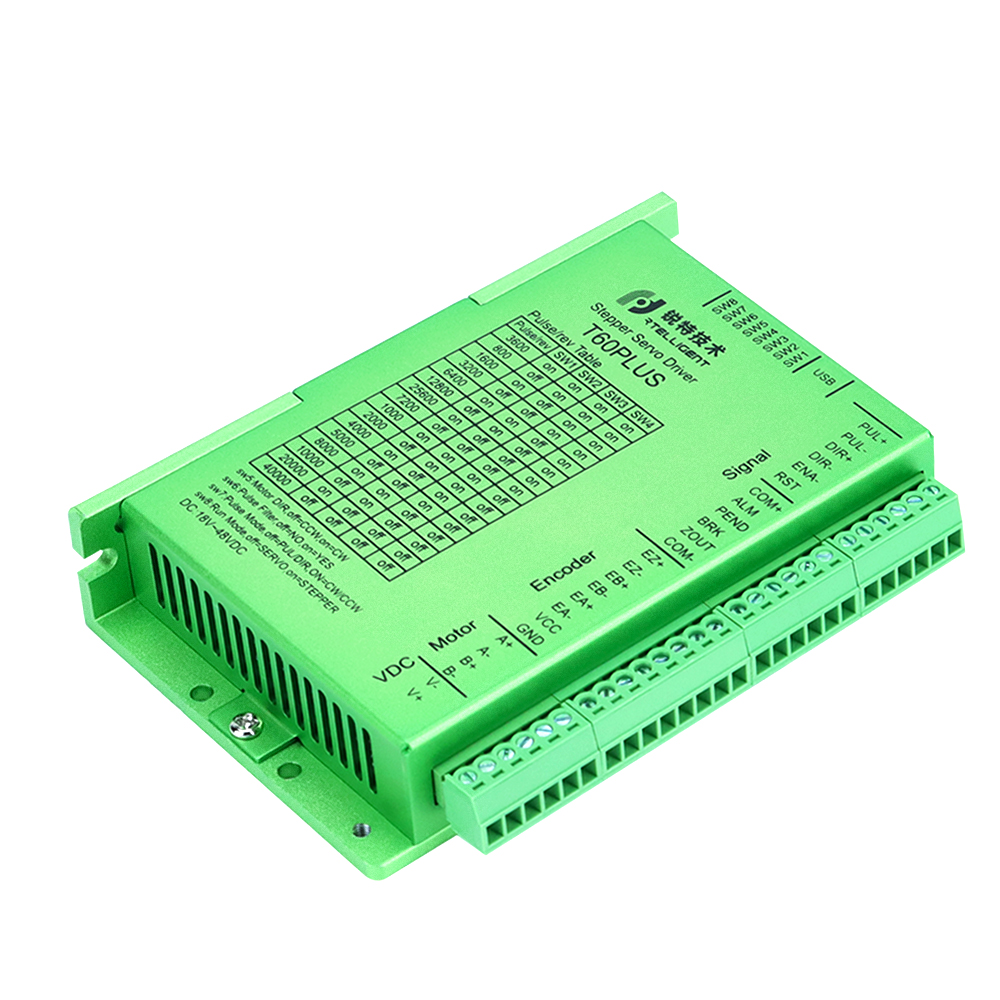


Kawalan Nadi 2 Fasa Gelung Tertutup Pemacu Stepper T60Plus


Pengenalan Produk



Sambungan

Ciri-ciri
| Bekalan kuasa | 18~48VDC |
| Ketepatan kawalan | 4000 Nadi/r |
| Mod nadi | Arah & nadi, nadi berganda CW/CCW, nadi kuadratur A/B |
| Kawalan semasa | Algoritma kawalan vektor servo |
| Tetapan subbahagian | Tetapan suis DIP, 15 pilihan (atau tetapan perisian penyahpepijatan) |
| Julat kelajuan | Konvensional 1200~1500rpm, sehingga 4000rpm |
| Penindasan resonans | Pengiraan automatik titik resonans untuk menyekat getaran frekuensi pertengahan |
| Pelarasan parameter PID | Perisian penyahpepijatan untuk melaraskan ciri PID motor |
| Penapis nadi | Penapis isyarat digital 2MHz |
| Keluaran penggera | Output penggera untuk arus lebih, voltan lampau, ralat kedudukan, dsb. |
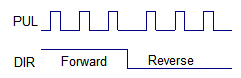
Mod Nadi
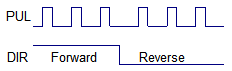
Antara muka isyarat pemacu siri T standard adalah berbentuk nadi, dan T60PLUS V3.0 boleh menerima tiga jenis isyarat arahan nadi.
| Denyutan dan arah (PUL + DIR) |
|
| Nadi berganda (CW +CCW) |
|
| Nadi ortogon (A/ B nadi ortogon) | 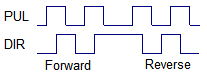 |
Tetapan langkah mikro
| Denyutan/rev | SW1 | SW2 | SW3 | SW4 | Teguran |
| 3600 | on | on | on | on | Suis DIP dihidupkan kepada keadaan "3600" dan perisian ujian boleh menukar subbahagian lain secara bebas. |
| 800 | dimatikan | on | on | on | |
| 1600 | on | dimatikan | on | on | |
| 3200 | dimatikan | dimatikan | on | on | |
| 6400 | on | on | dimatikan | on | |
| 12800 | dimatikan | on | dimatikan | on | |
| 25600 | on | dimatikan | dimatikan | on | |
| 7200 | dimatikan | dimatikan | dimatikan | on | |
| 1000 | on | on | on | dimatikan | |
| 2000 | dimatikan | on | on | dimatikan | |
| 4000 | on | dimatikan | on | dimatikan | |
| 5000 | dimatikan | dimatikan | on | dimatikan | |
| 8000 | on | on | dimatikan | dimatikan | |
| 10000 | dimatikan | on | dimatikan | dimatikan | |
| 20000 | on | dimatikan | dimatikan | dimatikan | |
| 40000 | dimatikan | dimatikan | dimatikan | dimatikan |
Tetapan langkah mikro
Terminal pemacu terbakar?
1. Jika terdapat litar pintas antara terminal, periksa sama ada belitan motor adalah litar pintas.
2. Jika rintangan dalaman antara terminal terlalu besar, sila semak.
3. Jika pematerian berlebihan ditambah pada sambungan antara wayar untuk membentuk bebola pateri.
Pemacu stepper gelung tertutup mempunyai penggera?
1. Jika terdapat ralat sambungan untuk pendawaian pengekod, sila pastikan anda menggunakan kabel sambungan pengekod yang betul, atau hubungi Rtelligent jika anda tidak boleh menggunakan kabel sambungan atas sebab lain.
2.Periksa jika pengekod rosak seperti output isyarat.
-
 Manual Pengguna Rtelligent T60PLUS V3.0
Manual Pengguna Rtelligent T60PLUS V3.0




